 新闻
新闻科研进展
茶树是一种多年生阔叶常绿灌木或小乔木,在世界各地广泛种植和消费,是重要经济作物。中国是茶叶种植大国,种植面积和茶叶产量居全球第一。茶树多生长于山区或丘陵地区,大范围监测十分不便,目前时空信息也较少用于茶叶种植和管理。为了获取准确的茶树空间分布,监测茶树生长,提高茶叶产量和品质,非常有必要准确监测茶树空间分布和状况,以制定有针对性的管理措施。近些年随着无人机技术的快速发展,无人机遥感逐渐成为精准农业科研和管理中的一种重要手段。
中国科学院武汉植物园系统生态学研究团队联合中国地质大学地理与信息工程学院万波教授团队开展了茶树无人机遥感研究,探究了无人机遥感在监测茶树上的有效性,在国际遥感领域期刊Remote Sensing发表题为“Effects of UAV-LiDAR and Photogrammetric Point Density on Tea Plucking Area Identification”的研究论文。
该研究以武汉市花山茶园为研究区,评价了不同点云密度的无人机激光雷达和立体像对点云数据在识别茶树采摘面积上的表现。研究发现,结合无人机激光雷达点云和光学影像数据可以准确识别茶树,精度高达94.39%,结合立体像对点云和光学影像数据的识别精度略低(91.58%)。对于激光雷达点云,当点云密度从25.44点/m2(即100%)减少到0.25点/m2(即1%)时,茶树识别精度明显降低,在随机森林和极限学习机算法上都呈现降低趋势。但是对于立体像对点云,点云密度对茶树识别精度影响并不大。本次研究同时发现,减少点云密度,会导致生成的茶园数字地形模型精度降低,这种影响在激光雷达点云上更明显。本研究也构建了识别茶树的重要特征层次结构树,用于指示每个选中特征在识别茶树上的具体作用,可为后续茶树遥感研究在准确候选特征时提供参考。
以上研究由武汉植物园硕士联培生张庆藩(第一作者)和王德智助理研究员(通讯作者)在张全发研究员和万波教授指导下完成。研究工作得到了国家自然科学基金(32101525和32030069)的资助。
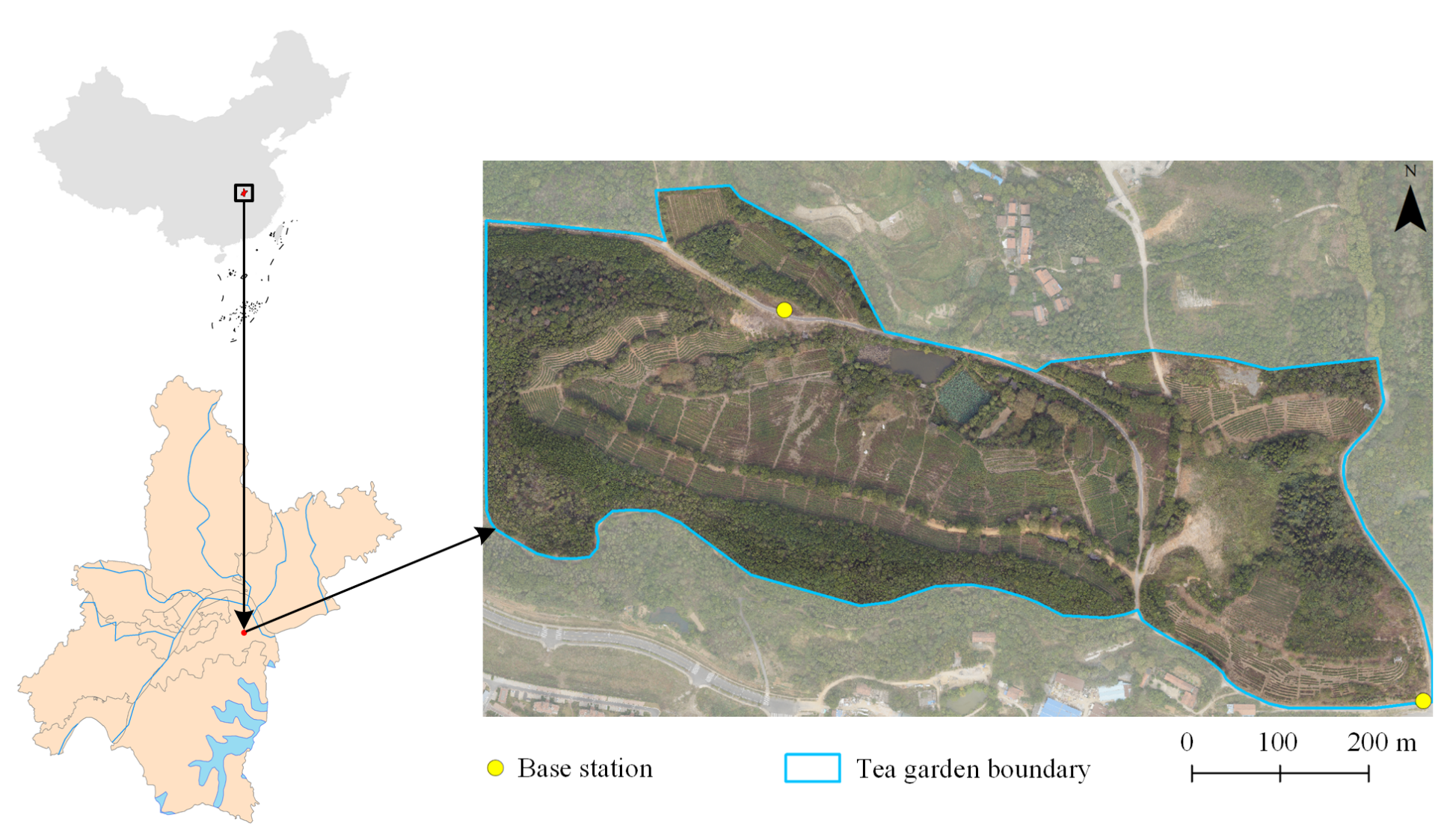
图1 武汉市花山茶园地理位置
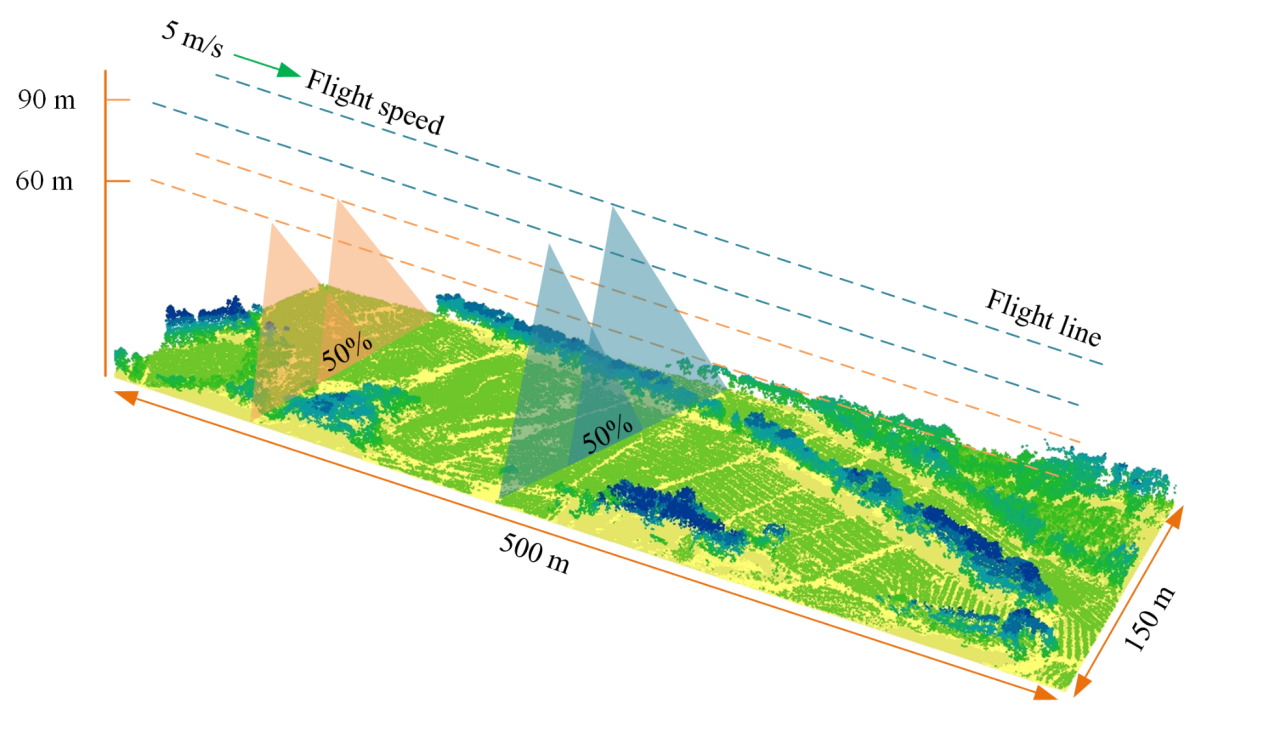
图2 无人机遥感数据采集
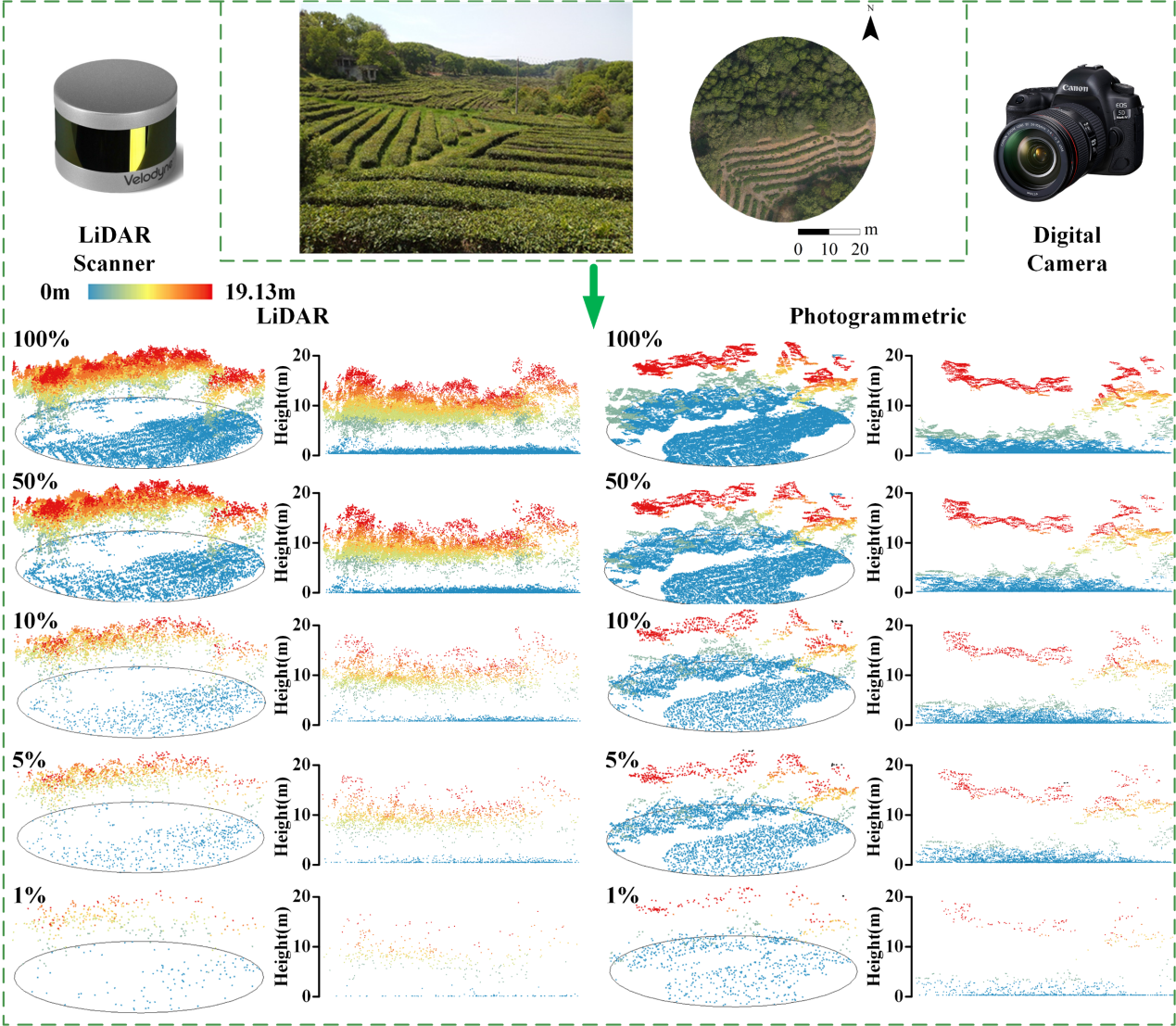
图3 点云抽稀